د ډیلټا روبوټ مدغم سیسټم
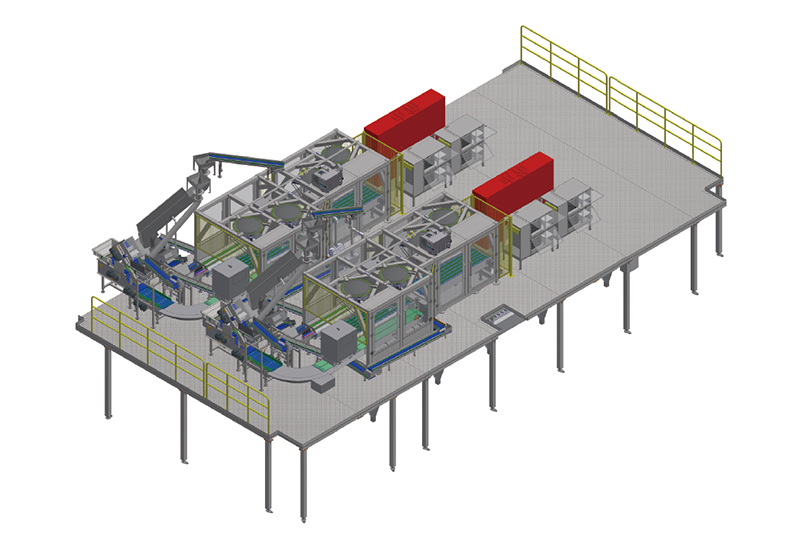
د داخلي بسته بندۍ غیر منظم محصولات له ذخیره څخه خارج کیږي. د سرو ان سکریمبلر لخوا ترتیب کولو وروسته او د محصول موقعیت د بصري سیسټم لخوا پیژندل کیږي. د کیس پیکینګ ماشین په جریان کې بیا بصري سیسټم به معلومات د سپایډر روبوټ سره شریک کړي، او سپایډر روبوټ به محصولات ونیسي او په اړونده بهرنۍ بسته بندۍ کې به ځای په ځای کړي.
غوښتنلیک
د بوتلونو، پیالو، بیرلونو، کڅوړو، لکه د پوډر شیدو چای، ورمیسیلي، فوري نوډلز، او نورو په بڼه د غیر منظم داخلي بسته بندۍ محصولاتو د ترتیب کولو، پیژندلو او نیولو لپاره مناسب، او په بهرنۍ بسته بندۍ کې یې ځای په ځای کړئ.
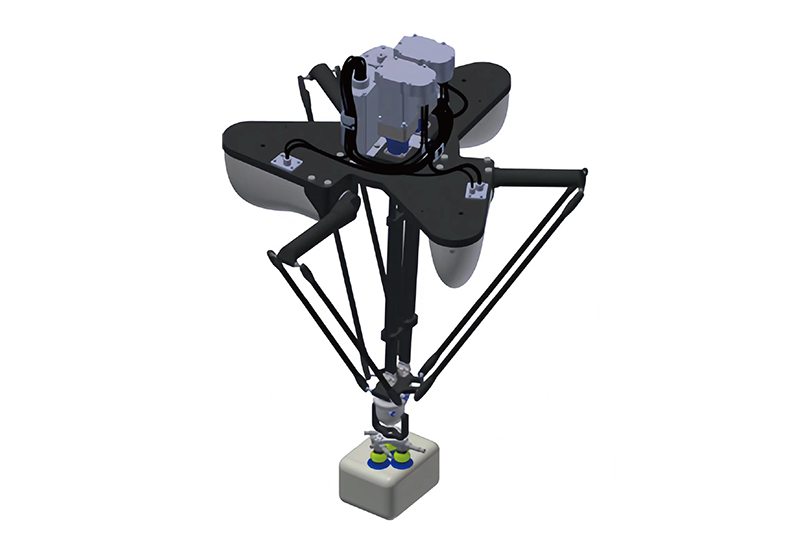
درې بعدي انځورګري


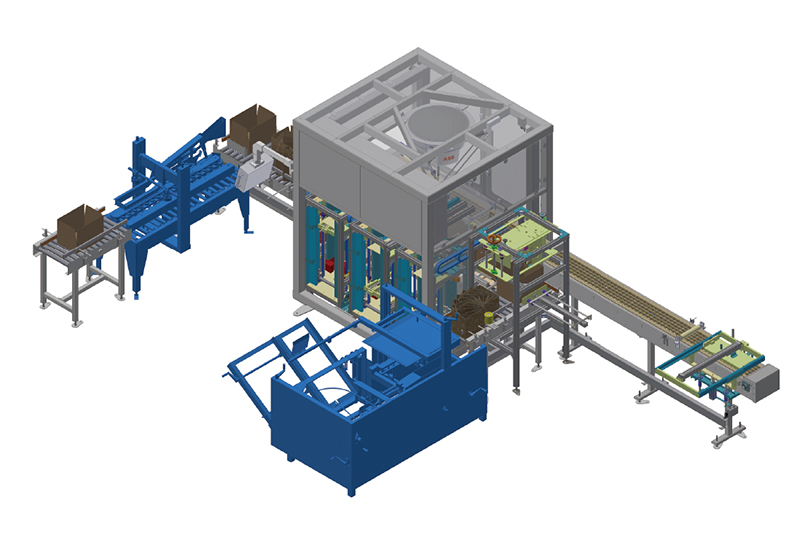
د بسته بندۍ کرښه
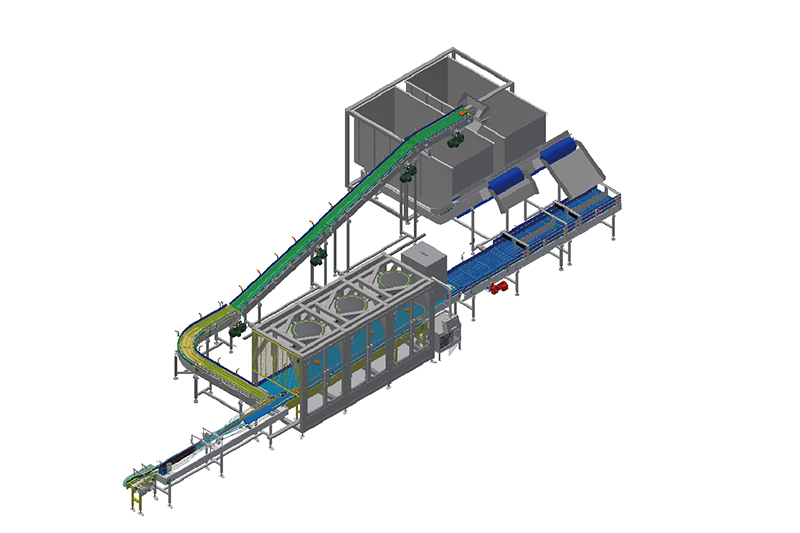
د ان سکریمبلر کرښه

بریښنایی ترتیب
| د PLC | سیمنز |
| د VFD | ډانفوس |
| سرو موټور | ایلاو-سیمنز |
| د فوتو الیکټریک سینسر | ناروغه |
| د نیوماتیک اجزا | ایس ایم سي |
| ټچ سکرین | سیمنز |
| د ټیټ ولتاژ وسایل | شنایډر |
| ټرمینل | فینکس |
| موټر | ګنډنه |
تخنیکي پیرامیټر
| ماډل | LI-RUM200 |
| ثابت سرعت | ۲۰۰ ټوټې/ دقیقې |
| د برېښنا رسونه | ۳۸۰ AC ±۱۰٪، ۵۰HZ، ۳PH+N+PE. |
نور ویډیويي نندارې
- د ډیلټا روبوټ ترتیب کول، تغذیه کول، خلاصول او د کیسونو بسته کولو لاین






